|
Walabot API Beta
All you need to know to create a Walabot Application
|
|
Walabot API Beta
All you need to know to create a Walabot Application
|
Walabot can provide your application with several types of imaging data. These depend primarily on two types of settings:
The following profiles are available:
The following types of Get actions are available:
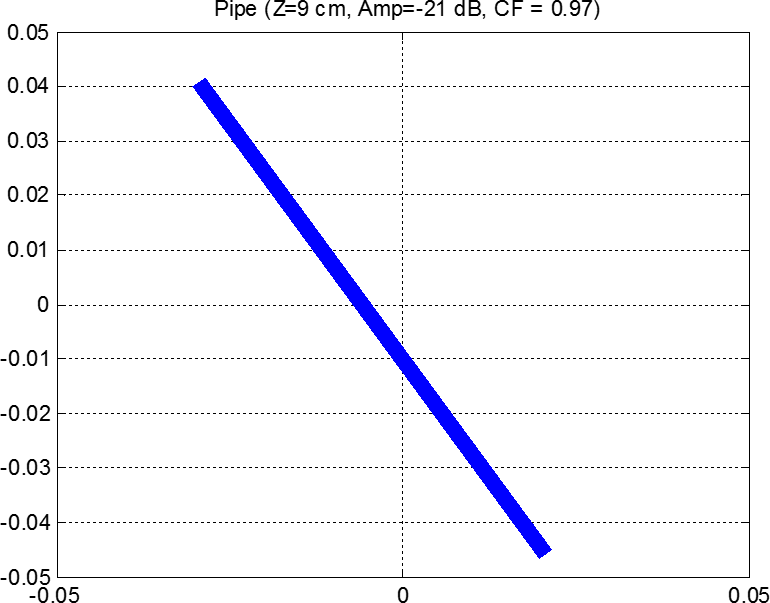
Here are a few examples of applicative displays based on data provided by various profile / get combinations:


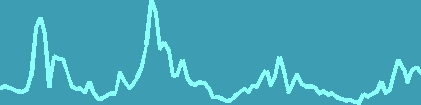
For applications that require tracking movement, Walabot can apply a dynamic-imaging filter that removes static signals, leaving only changing signals. In addition to the Moving Target Identification (MTI) filter, the Derivative filter is available for the specific frequencies typical of breathing. Here’s an example display of Derivative-filtered image energy from sensor-narrow scanning (breathing):
Walabot calibrates scanning to ignore or reduce the signals of fixed reflectors such as walls. Additionally, for raw images (3-D and Slice), Walabot removes very weak signals according to a configurable sensitivity threshold.
Upon Get actions, Walabot processes and provides image data for a configurable, delimited space known as the arena, with configurable image resolution. If the triggered scan used the short-range profile, the arena size should have similar dimensions as Walabot, and you’ll specify it by Cartesian coordinates (ranges and resolution on the x, y, z axes); If one of the Sensor or Tracker profiles was used, the arena is usually much larger and
a Spherical coordinates system is being used (ranges and resolution along radial distance and Theta and Phi angles).
Your application can convert spherical coordinates to Cartesian ones, using the formulae:
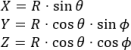
For example:

For arena definitions, and in image data provided by Walabot, Cartesian (X-Y-Z) axes start from Walabot's center as the origin, and their positive directions are:
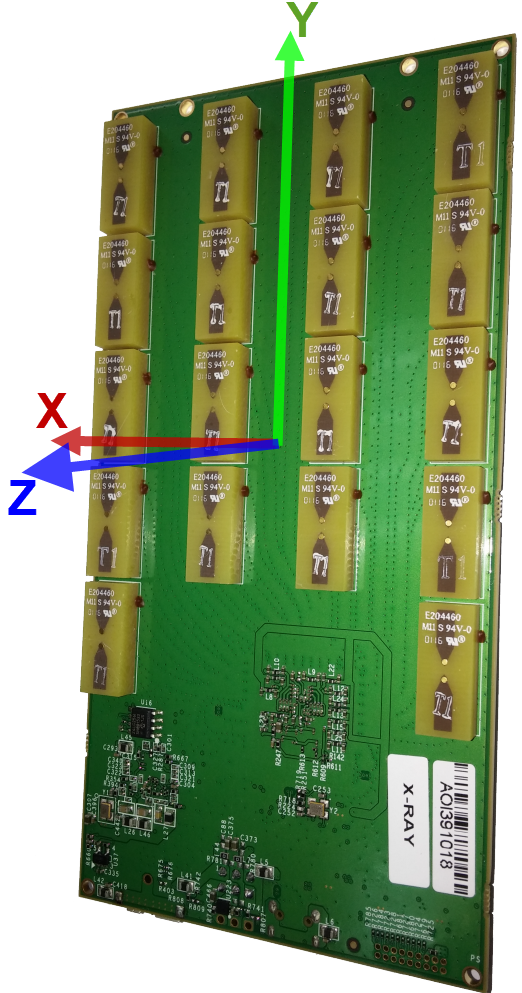
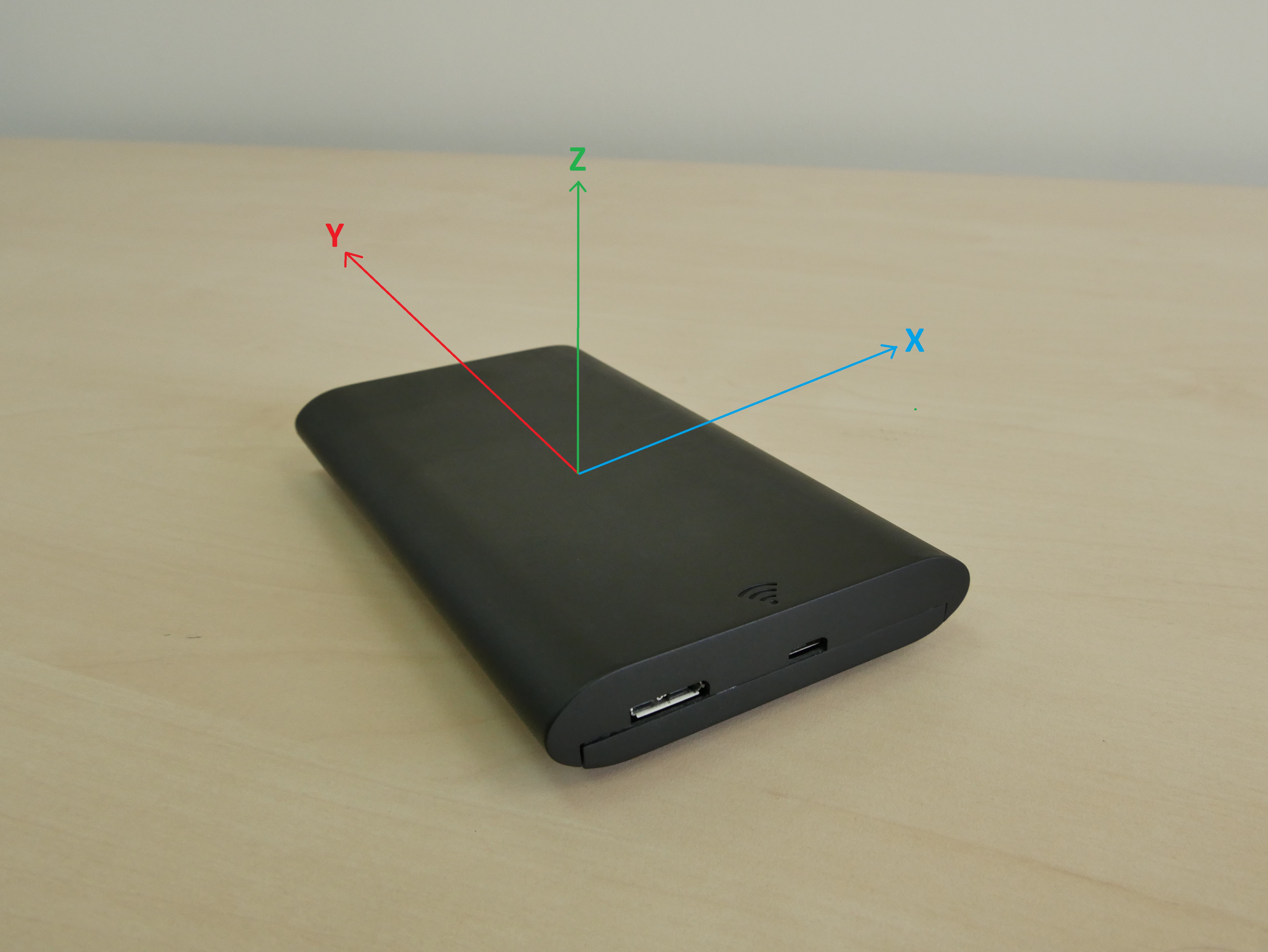
When Walabot is in its plastic case, Walabot's bottom as in the above figure is at the USB connector, and the side visible in the above figure (the front) faces away from the case's Walabot logo (the logo is in the back). For spherical coordinates, radial distance (R) is from Walabot along the Z axis, and polar angle (Θ) is from the Z axis.
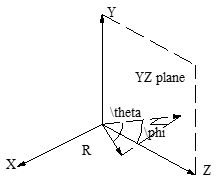
Azimuth angle is from the X axis to orthogonal projection on the XY plane.
Units are in centimeters and degrees as relevant.
Now that you understand what Walabot can do, you can begin to design high-level application flow according to the Imaging Tasks.
Fill out our 5 question survey Share Your API Feedback
 1.8.14
1.8.14